葛斯琴研究團隊提出昆蟲爬行運動控製新方法
趨光行為作為動物眾多行為特性之一,尤其在昆蟲學中有著大量研究報道。人類很早就發現了昆蟲的趨光現象,並廣泛應用於農業、衛生害蟲防治,以及科研、科普用途的昆蟲采集。這些應用的本質均為基於定點光源的昆蟲誘集或誘殺。如果將定點光源改為動態光源,能否改變昆蟲的運動方向,從而達到人為操控其定向運動的目的呢?
近日,必威精装版app西汉姆联 葛斯琴團隊聯合中國科學院大學光電學院史禕詩團隊、中國科學院合肥物質院張超凡團隊在《Biomimetics》期刊發表最新研究成果,題目為“Light-Guided Cyborg Beetle: An Analysis of the Phototactic Behavior and Steering Control of Endebius florensis (Coleoptera: Scarabaeidae)”,首次實現了基於光引導的昆蟲精準轉向操控,並研發了相應的無線控製裝置。
該研究以佛恩犀金龜(Endebius florensis,亦稱佛羅倫斯姬兜)為載體昆蟲,通過電生理和行為學實驗從可見光波段常見的LED(藍色463~469 nm、綠色516~525 nm、黃色586~596 nm、紅色625~645 nm)中篩選對其引誘能力最強的波段。結果顯示,藍色LED能引起載體昆蟲穩定的趨光行為反應。隨後,研究團隊以商用單片機(Arduino pro mini)為核心搭建了光引導電子背包。該電子背包包含1個射頻模塊(SYN520R),能夠接收433 MHz的射頻信號,用於接收無線指令;背包前端載有2顆藍色LED燈珠,當背包固定於載體昆蟲前胸背板上時,2顆LED燈珠分別位於昆蟲複眼的左前方和右前方,用於產生引導昆蟲轉向的光信號。通過向射頻接收模塊發送不同的無線指令,指導單片機點亮不同方向的LED燈珠,即可引導載體昆蟲朝預定的方向爬行,從而實現對其運動方向的遠程無線操控。測試結果顯示,點亮引導光源後,載體昆蟲體軸在5 s內分別向左、右兩側偏轉了65.34°和58.35°,轉向角速度分別為12.47°±2.63°和11.67°±1.35°,極顯著高於引導前的0.70°±2.32°和1.79°±1.31°。
該研究通過在活體昆蟲背部搭載專用電子背包,構建了一種新型半機械昆蟲。這類生物-機電融合係統,利用昆蟲自身的爬行和能量實現運動與避障,相比純機械係統具有更強的可通過性和魯棒性,能夠進入人類難以抵達的洞穴、隧道或廢墟中,在災後救援、洞穴生態監測等領域具有巨大的應用潛力。此前,絕大多數半機械昆蟲的定向操控大多采用電刺激的方案,利用昆蟲對電流的趨避行為實現運動控製,盡管已經達到了較好的控製效果,但電極植入和反複電刺激均會對載體昆蟲造成不可逆轉的損傷,從降低後續刺激的靈敏度和有效性。相比電刺激方案,該研究提出的光引導方案為無侵入式操控,電子背包搭載過程無需創口,搭載速度快,操作門檻低;同時,光刺激也不會對昆蟲組織造成損傷,因此具備長時間工作的能力。這項研究作為光引導半機械昆蟲方案的初步探索,驗證了動態光源引導昆蟲定向運動的技術可行性,為半機械昆蟲的研發與應用提供了新的思路。
中國科學院動物所葛斯琴研究員、中國科學院大學光電學院史禕詩教授為論文共同通訊作者。中國科學院動物所博士生張天浩和助理研究員黃正中博士為該文的共同第一作者。該研究得到必威精装版app西汉姆联 自主部署項目(No.2023IOZ0310和No.2023IOZ0104)、動物多樣性保護與有害動物防控重點實驗室自主部署課題(No.SKLA2502)、國家自然科學基金(No.32270460)的資助。
原文鏈接:https://doi.org/10.3390/biomimetics10080513

圖1 佛恩犀金龜的趨光行為反應
A:個體在近光區停留時間占比;B、C:雄性(B)與雌性(C)個體在測試場地中的角度分布;D-G:雄性個體在藍光(D)、綠光(E)、黃光(F)、紅光(G)條件下的運動軌跡;H-K:雄性個體在藍光(H)、綠光(I)、黃光(J)、紅光(K)條件下的角度分布;L-O:雌性個體在不同波長條件下的運動軌跡;P-S:雌性個體在不同波長條件下的角度分布。
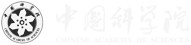
圖2 半機械昆蟲及其運動控製測試
A:電子背包構成組件;B:控製芯片的最小係統原理圖;C:射頻模塊原理圖;D:組裝完成的電子背包及載體昆蟲;E:半機械昆蟲;F:轉向控製前後半機械昆蟲的體軸偏轉角度;G:轉向控製前後半機械昆蟲的轉向角速度;H:光引導半機械昆蟲的潛在應用示意圖。
卵母細胞減數分裂涉及兩次染色體分離與胞質分裂,最終形成單倍體配子,在此過程中,正確組裝並穩定發揮功能的紡錘體保證了染色體的精確分離與細胞分裂進程。

衰老,作為一項涉及多器官、跨越多重生物學層級的機體係統性退行性演變,其深層的分子機製至今仍是生命科學領域懸而未決的核心命題。在人類漫長的生命周期中,一個根本性問題在於:各器官係統是否遵循統一的衰...

輻射式演化是生物多樣性形成的重要過程之一。作為適應輻射(Adaptive Radiation)的經典案例,加拉帕格斯群島的達爾文雀或東非的慈鯛等類群受生態位分化驅動的快速物種形成過程為人熟知。