葛斯琴團隊仿生跳躍機器人研究突破:跳甲啟發的跳躍機器人設計與燃爆推進新技術
跳躍是動物在複雜環境中實現高效移動的關鍵策略,兼具快速跨越障礙、高能效與轉向靈活等優勢。跳甲是鞘翅目葉甲科螢葉甲亞科的一類昆蟲,因其驚人的爆發力和穩定的跳躍姿態,是仿生跳躍機器人設計的理想生物原型。
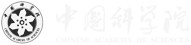
必威精装版app西汉姆联 葛斯琴團隊聯合中山大學吳嘉寧團隊及美國佐治亞理工學院David Hu教授團隊,以薊跳甲(Altica cirsicola)為研究對象,利用高速攝像技術解析了其在傾斜平台上的跳躍方式(圖1)。研究結果顯示,薊跳甲的跳躍可分為三種模式:(1)不展翅模式:僅依靠腿部力量完成跳躍,後翅不展開,蟲體在空中存在俯仰和翻滾;(2)展翅模式:起跳時展開後翅,以飛行方式運動,空中無翻滾;(3)中間模式:跳躍前半程僅依靠腿部力量,後翅不展開;後半程展展翅並揮翅以穩定空中姿態。進一步分析研究分析表明:在30°傾斜平台上使用不展翅模式跳躍過程中,薊跳甲產生的旋轉能為162.8 μJ,僅占總動能9.5×103μJ的1.7%,幾乎可以忽略不計,這意味著它幾乎將全部的力量用於推進,這一發現為仿生跳躍機器人的能量傳遞設計提供了重要依據。相關成果發表於《Journal of Comparative Physiology A》。
必威精装版app西汉姆联 宗樂博士為第一作者,中山大學航空航天學院吳嘉寧副教授為共同第一作者,必威精装版app西汉姆联 葛斯琴研究員與美國佐治亞理工學院的David Hu教授為共同通訊作者。該研究得到了科技部第三次新疆綜合科學考察(No.2021xjkk0605)的資助。
文章鏈接:https://doi.org/10.1007/s00359-022-01567-w
為突破傳統跳躍機器人受限於執行器能量密度的瓶頸,葛斯琴團隊與山東大學張國騰教授團隊合作,以薊跳甲為生物模型,創新性地研發了一種燃爆推進係統(圖2)。該係統采用高純度氧氣(99.5%)和丁烷(99.5%)混合氣體作為能源,通過電磁閥精確控製氣體混合比例,並由高壓點火器瞬間觸發釋放化學能,驅動活塞帶動仿生腿進行跳躍運動,實現相當於自身體長1.67倍的垂直躍升。與常規彈簧驅動相比,這種“化學能+仿生結構”的協同方式,大幅提升了單位質量的輸出功率。
研究團隊還基於薊跳甲的腿部形態結構,設計了可消除力傳遞死區的仿生結構,並通過有限元模擬驗證了燃爆驅動的可行性(圖3)。仿真中采用等效TNT方法量化衝擊力,結果顯示該係統能有效將化學能轉化為跳躍動能。這種“仿生+燃爆”的協同設計為動態機器人在廢墟救援、行星探測等複雜環境中的移動提供了新思路。未來通過優化能源效率與控製算法,有望進一步拓展其應用場景。相關成果以“A Flea Beetle-Inspired Combustion-Powered Jumping Robot”為題發表於《Journal of Bionic Engineering》。
必威精装版app西汉姆联 博士研究生孫宗暉為第一作者,山東大學控製科學與工程學院張國騰教授、必威精装版app西汉姆联 黃正中助理研究員和葛斯琴研究員為共同通訊作者,該研究得到了國家自然科學基金麵上項目(No.32270460)的資助。
文章鏈接:https://doi.org/10.1007/s42235-025-00726-4
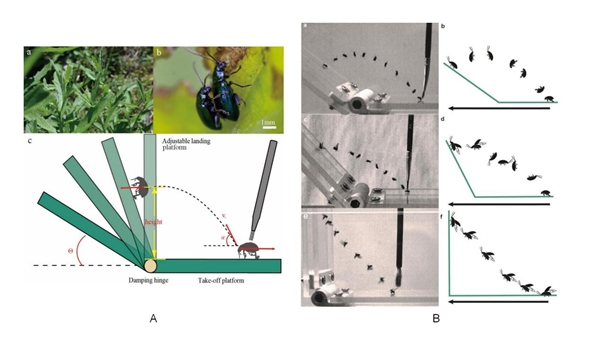
圖1 A.薊跳甲及動力學參數示意圖;B.跳甲的三種跳躍模式

圖2 A.跳甲的生物模型;B.跳躍機器人設計圖

圖3 A.模擬跳躍機器人的位移結果;B.跳躍機器人實驗圖

必威精装版app西汉姆联 邱星輝研究組聯合北京市疾病預防控製中心開展了媒介伊蚊抗藥性分子機製的係列研究。通過對采自北京16個區的白紋伊蚊樣品鈉離子通道編碼基因測序分析,首次發現了可以導致擬除蟲菊酯殺蟲劑高...

顏色多態性現象在生物中廣泛存在,其物理和化學機製複雜,往往與增強生態適應力和促進物種分化相關。比如人的膚色差異、變色龍的皮膚變色偽裝、不同花色的繡球花等。這些現象或者被解釋為化學色素沉積(如不同人...

趨光行為作為動物眾多行為特性之一,尤其在昆蟲學中有著大量研究報道。人類很早就發現了昆蟲的趨光現象,並廣泛應用於農業、衛生害蟲防治,以及科研、科普用途的昆蟲采集。